Hoy queremos repasar la evolución del servomotor desde sus orígenes hace 50 años hasta nuestros días. De forma rápida y somera esperamos dar un poco de luz sobre el conocimiento de estos dispositivos.
Antes de empezar queremos recordar al inventor, ingeniero mecánico, ingeniero eléctrico y físico de origen servo croata, NIKOLA TESLA. Sus aportaciones en el terreno de la ingeniería y en concreto en el campo de la electricidad han tenido tanta importancia que es justo traerlo a nuestra memoria en este punto. Él marcó el inicio de muchas teorías y desarrollos que serían la base de infinidad de proyectos posteriores.
 Nikola Tesla (10-07-1856 / 07-01-1943).
Nikola Tesla (10-07-1856 / 07-01-1943).
Se le conoce por sus numerosas invenciones en el campo del electromagnetismo, además de que las patentes y el trabajo de TESLA formaron la base de los sistemas modernos en el uso de la energía eléctrica por corriente alterna.
 Ya en el año 1887 construyó un motor de inducción sin escobillas alimentado por corriente alterna. Sin olvidar avances tan importantes como el conocido sistema trifásico de corriente alterna, así como el principio del campo magnético rotativo en el motor de inducción. Tesla fue un genio que dio a luz innumerables aportaciones que otros aprovecharon, bebiendo de su conocimiento y sabiduría.
Ya en el año 1887 construyó un motor de inducción sin escobillas alimentado por corriente alterna. Sin olvidar avances tan importantes como el conocido sistema trifásico de corriente alterna, así como el principio del campo magnético rotativo en el motor de inducción. Tesla fue un genio que dio a luz innumerables aportaciones que otros aprovecharon, bebiendo de su conocimiento y sabiduría.
Evolución del servomotor.
Ya os decíamos anteriormente que han transcurrido 50 años desde la aparición de los primeros servomotores, el denominado motor de disco de CC. En esencia estaba basado en un disco o circuito impreso, el cuál era el soporte de unas espiras o bobinas giratorias, que una vez fijado este conjunto al eje formamos el rotor o parte interior.
Por otro parte, a ambos lados, en los escudos, además de soportar los rodamientos, también se fijaban unos imanes permanentes. La alimentación de energía a las bobinas del disco es por medio de unas escobillas + positivo, – negativo.
Este sistema no ha estado exento de problemas por el polvo de carbón, debido al desgaste de las escobillas. Para el codificador de control se utiliza el mismo sistema de disco generando una tensión variable según su velocidad, también conocido como tacómetro.



Más tarde se desarrolla el motor de disco de CA trifásico. En cuanto a su forma constructiva es similar al anterior, pero en su interior el disco incorpora imanes permanentes que forman el conjunto del rotor. Además, en ambos lados de los dos escudos se le incorpora un devanado trifásico conectados entre sí, en sustitución de los imanes permanentes. En este caso, para el codificador de control se utiliza un sensor de hall effect, en la conmutación de las tres fases. Estos dos tipos de servomotor se han fabricado en potencias relativamente pequeñas 38 Nm.

Bases del funcionamiento.
En una constante innovación se impulsa estos dos conceptos de motores de disco en un nuevo formato constructivo tanto del estator como del rotor, en los de CC. El estator lo forman imanes permanentes de mayor capacidad y el rotor estará compuesto de un núcleo magnético con un devanado conectado a un colector con escobillas para su conmutación.
 En el motor de CA trifásico, el más utilizado en la actualidad, invertimos al de CC. El estator está formado por un núcleo magnético al cual se insertan unas bobinas por fase A-B-C formando un número de polos que será igual al del rotor. Éste estará formado de la misma manera por un núcleo magnético al que se le fijan imanes permanentes N-S. Solidario en su conjunto al eje que transmite la potencia útil.
En el motor de CA trifásico, el más utilizado en la actualidad, invertimos al de CC. El estator está formado por un núcleo magnético al cual se insertan unas bobinas por fase A-B-C formando un número de polos que será igual al del rotor. Éste estará formado de la misma manera por un núcleo magnético al que se le fijan imanes permanentes N-S. Solidario en su conjunto al eje que transmite la potencia útil.
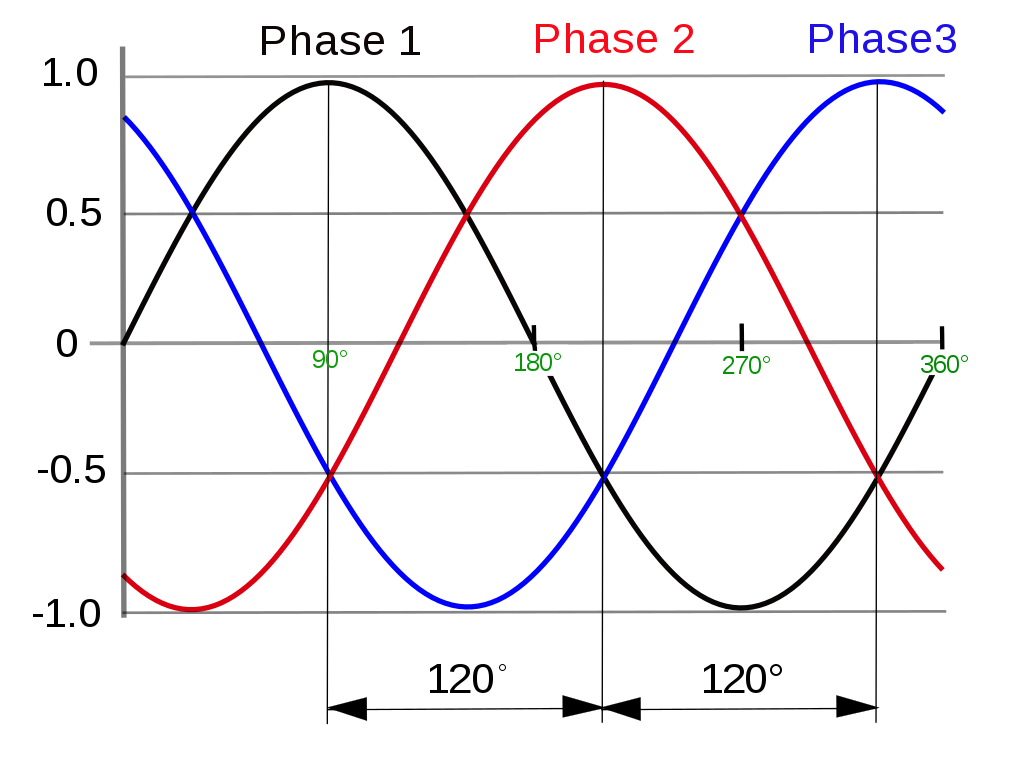
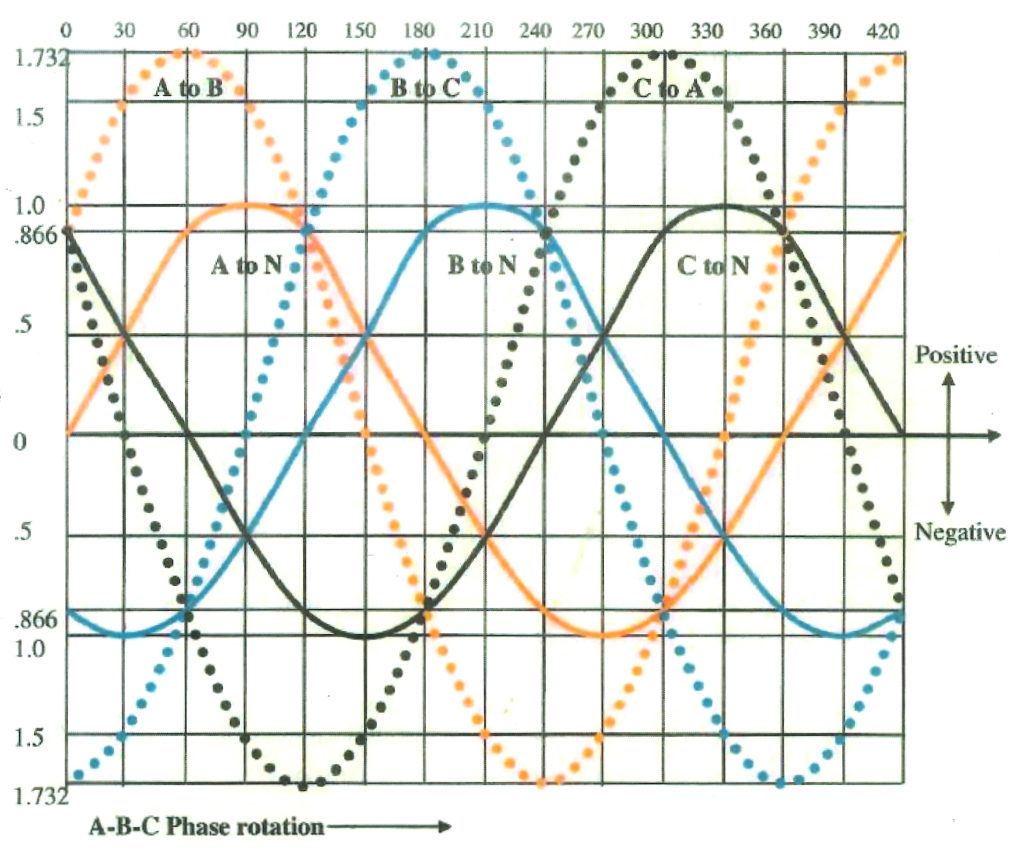 El campo electromagnético alterno desfasado de 120º entre A-B-C que generan las bobinas del estator hace que los polos cambien de polaridad, y como efecto inmediato producen el giro del rotor.
El campo electromagnético alterno desfasado de 120º entre A-B-C que generan las bobinas del estator hace que los polos cambien de polaridad, y como efecto inmediato producen el giro del rotor.
 Estas conmutaciones con el rotor están controladas por un codificador que gira solidario al eje, (Hall Effect, Resolver Encoder serie, incremental o absoluto). Estos dispositivos forman un Feedback de comunicación con el driver o controlador. Esto es como hacer una foto precisa de la posición del eje, cuanto mayor sea la resolución del encoder o el número segmentos o unidades de medición en una revolución de un eje de encoder o 1 pulgada/mm de una escala lineal, tendremos una mayor precisión.
Estas conmutaciones con el rotor están controladas por un codificador que gira solidario al eje, (Hall Effect, Resolver Encoder serie, incremental o absoluto). Estos dispositivos forman un Feedback de comunicación con el driver o controlador. Esto es como hacer una foto precisa de la posición del eje, cuanto mayor sea la resolución del encoder o el número segmentos o unidades de medición en una revolución de un eje de encoder o 1 pulgada/mm de una escala lineal, tendremos una mayor precisión.
La resolución del encoder se mide normalmente en pulsos por revolución (PPR) para los encoder incrementales y en bits para los encoder absolutos. Cada vez hay una mayor precisión, 24 Bits significa que el motor se detendrá con una mayor precisión de su posición. Los servomotores pueden tener una eficiencia de hasta el 98% a plena carga y tener una baja densidad de potencia ya que no hay corriente en el rotor, lo que equivale a decir que el motor puede producir un 100% de torque.
Usos del servomotor.
 Hemos hablado de la evolución del servomotor, ahora vamos a ver de forma básica sus aplicaciones. En la actualidad existe una gran diversidad de servomotores que se aplican en diferentes procesos industriales tanto en la precisión del movimiento y de potencia como son los motores torque de 8.000 Nm. Según sea la necesidad de la aplicación, gracias a los imanes de Neodimio NdFeB.
Hemos hablado de la evolución del servomotor, ahora vamos a ver de forma básica sus aplicaciones. En la actualidad existe una gran diversidad de servomotores que se aplican en diferentes procesos industriales tanto en la precisión del movimiento y de potencia como son los motores torque de 8.000 Nm. Según sea la necesidad de la aplicación, gracias a los imanes de Neodimio NdFeB.
Si queremos pensar en las aplicaciones de los servomotores es necesario pensar en su definición. Un servomotor es un motor o actuador rotativo o lineal, que puede controlar posición, velocidad, potencia y aceleración de forma precisa. Capacidades estas que un motor normal no tiene en absoluto. En consecuencia, serán estas características las que definan sus usos.

 Las aplicaciones de los servomotores en el ámbito industrial son usos en los cuales son necesarias variaciones rápidas de velocidad y posicionamiento. Un ejemplo claro es la robótica industrial, donde se realizan y repiten movimientos sincronizados. Otros ejemplos de aplicación son los procesos de fabricación con sistemas de automatización y control, en las aplicaciones de mecanizado de control numérico (CNC).
Las aplicaciones de los servomotores en el ámbito industrial son usos en los cuales son necesarias variaciones rápidas de velocidad y posicionamiento. Un ejemplo claro es la robótica industrial, donde se realizan y repiten movimientos sincronizados. Otros ejemplos de aplicación son los procesos de fabricación con sistemas de automatización y control, en las aplicaciones de mecanizado de control numérico (CNC).
Si os ha interesado este artículo sobre la evolución del servomotor y tenéis alguna duda sobre los servomotores, preguntadnos desde ESTE FORMULARIO.