 Vamos a explicar qué es un servomotor. Ya os hemos comentado que en GDM nos dedicamos entre otras cosas a la reparación de servomotores, y hemos pensado que es el momento de explicar que son. De forma concisa un servomotor es un motor eléctrico capaz de controlar la posición del eje bajo un par constante, velocidad variable y según las consignas recibidas desde el driver.
Vamos a explicar qué es un servomotor. Ya os hemos comentado que en GDM nos dedicamos entre otras cosas a la reparación de servomotores, y hemos pensado que es el momento de explicar que son. De forma concisa un servomotor es un motor eléctrico capaz de controlar la posición del eje bajo un par constante, velocidad variable y según las consignas recibidas desde el driver.
El servomotor se compone de un motor eléctrico y un circuito de control. El servomotor es el esclavo del driver, están en permanente estado de comunicación, el motor informa de su posición al driver y ejecuta las órdenes de este sobre la posición exacta que debe de tener el eje. Esta comunicación bidireccional es clave en un servomotor, no solamente le decimos al motor que queremos que haga, sino que además comprobamos que se ha hecho.
El campo de aplicación de los servomotores es tremendamente amplio. Toda máquina que requiera de un control de velocidad y posicionamiento con elevada exactitud tiene como componente principal un servomotor. Velocidad y posicionamiento son las características de trabajo más relevantes, así como el control del par. Podemos necesitar un control del par a cero revoluciones, cosa que podemos conseguir mediante un servomotor.
 Partes de un servomotor.
Partes de un servomotor.
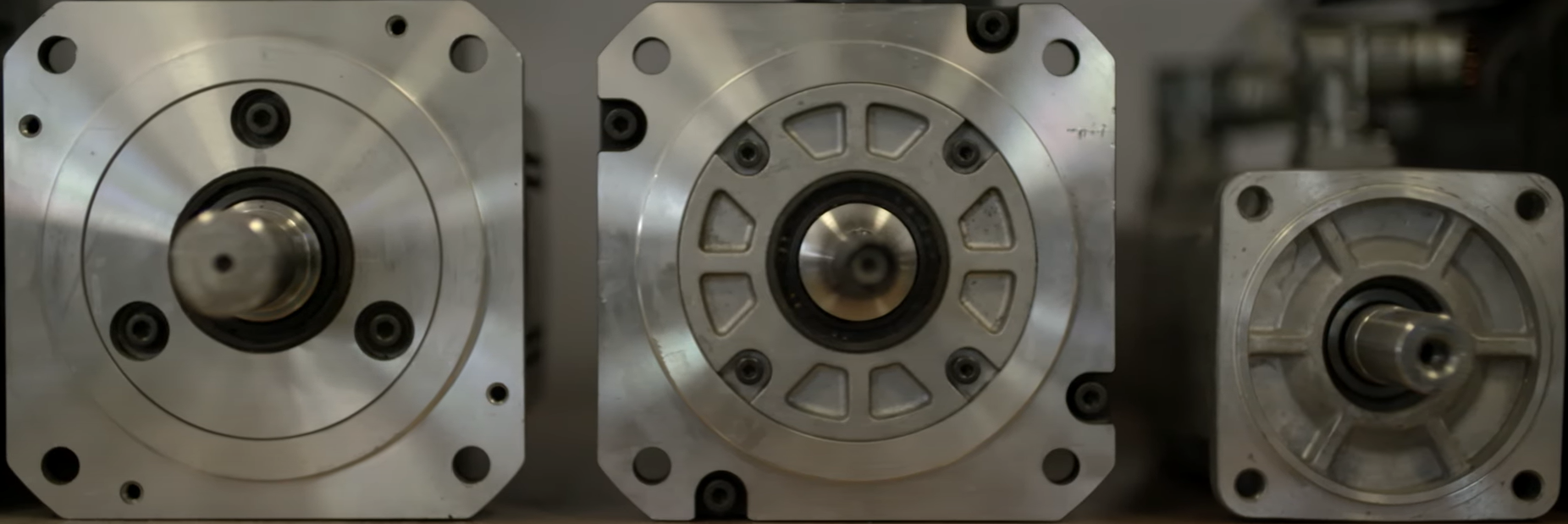
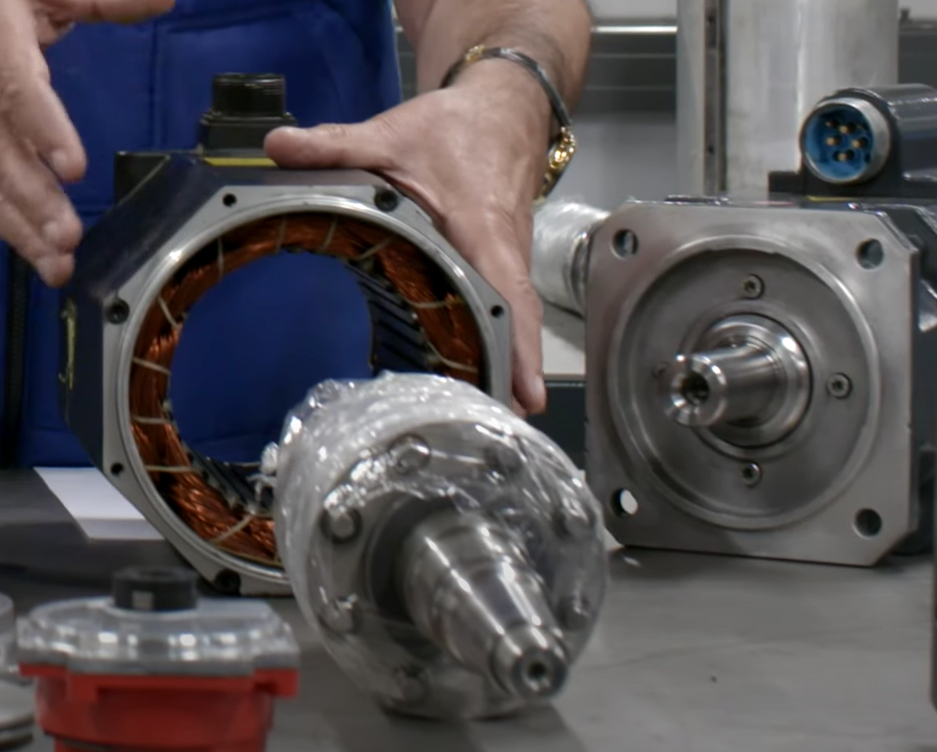
Las partes esenciales de un servomotor son el estátor, el rotor y el codificador. El estátor genera un campo magnético que se conmuta con otro campo magnético permanente incorporado en el rotor y que posee el mismo número de polos que el del estátor. Esta conmutación se desarrolla gracias a la acción del encoder o codificador.
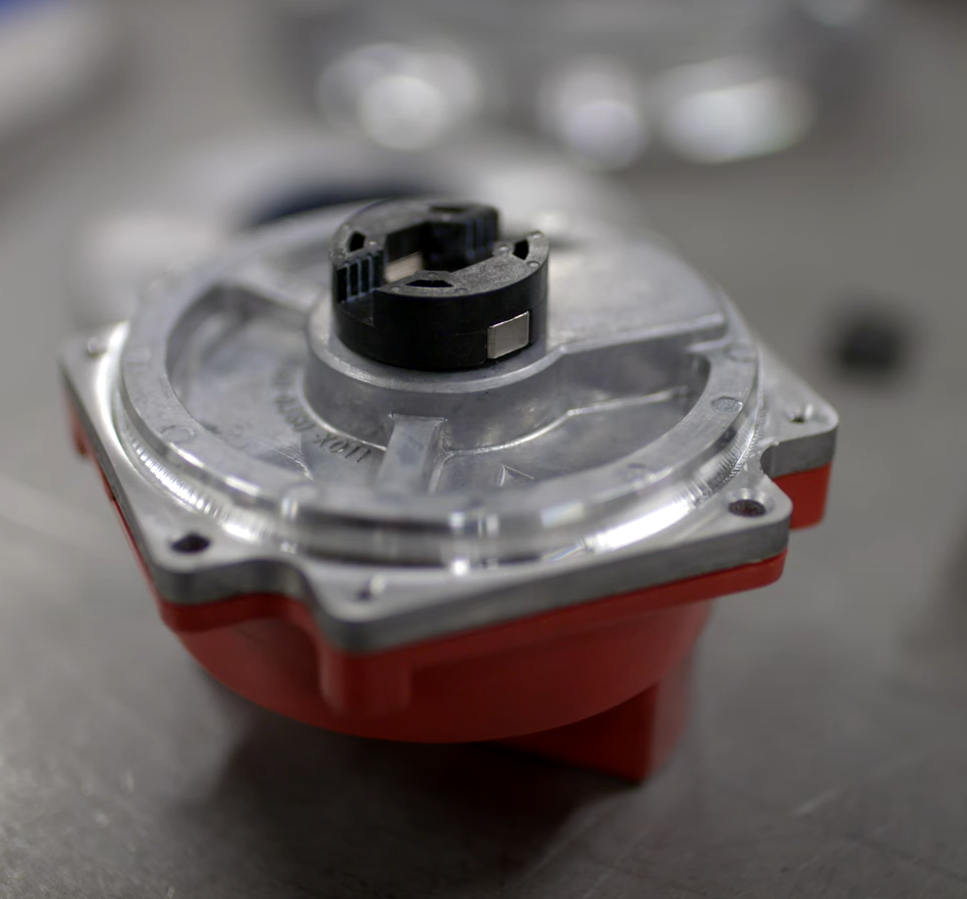
Un encoder es un dispositivo electromecánico que permite codificar el movimiento angular de un eje en un impulso mecánico. Podríamos decir que el encoder transforma el movimiento en señales eléctricas que interpretadas por un sistema de control. Los encoder pueden ser incrementales, serie o absolutos, dependiendo de la precisión o aplicación a la que se destine el motor.
También podemos tener un reductor que nos permitirá adaptar la velocidad de giro máxima a la que nos requiera la máquina, así como también controlar el par.
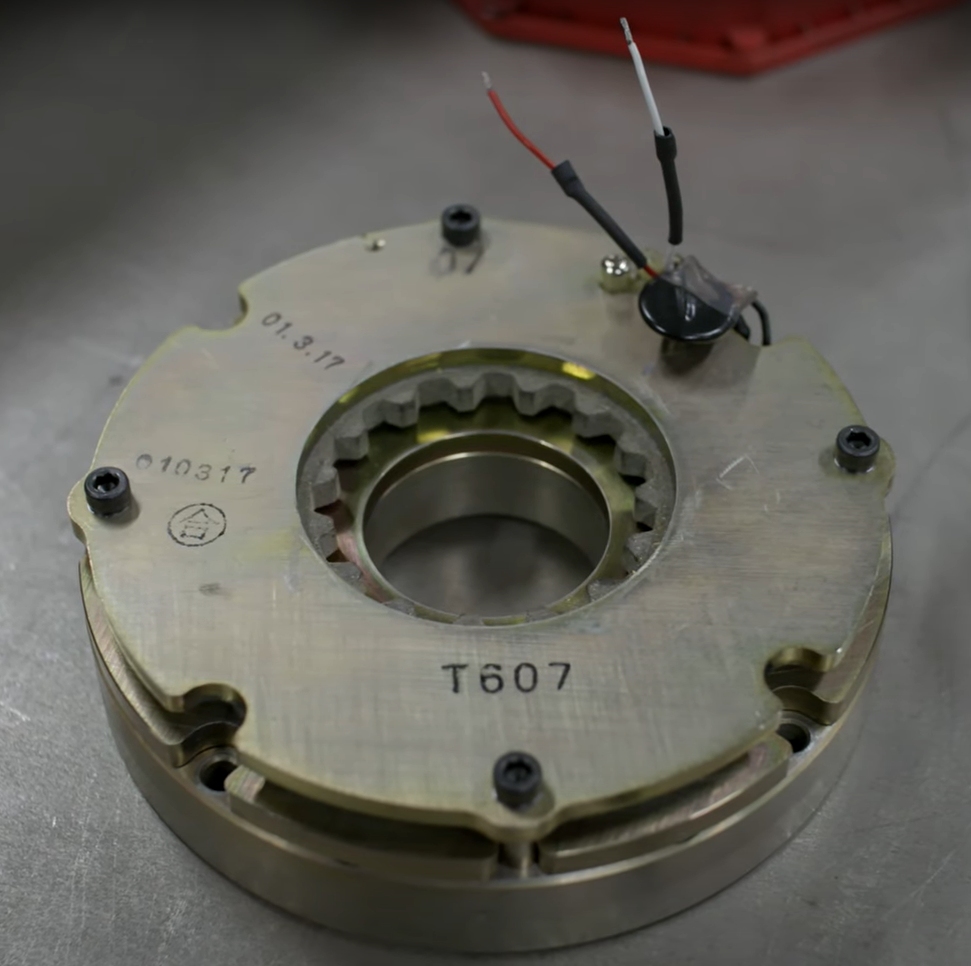
Los servomotores pueden ser de AC o DC, y dependiendo de la aplicación pueden llevar freno. Este freno puede ser magnético o de ferodo.
Características de los servomotores.
Si los comparamos con los motores trifásicos de inducción, estos son asíncronos ya que el rotor de jaula de ardilla produce un cierto deslizamiento. Mientras que por otro lado los servomotores son síncronos y no se genera ese deslizamiento. Además, conseguimos un ahorro de energía frente a los motores trifásicos.
Permiten un control exacto de la posición del eje, de la velocidad de este, así como del par.
Tienen unos tiempos de respuesta extremadamente cortos, por lo que nos permiten conseguir aceleraciones y deceleraciones realmente grandes.
Son motores realmente potentes en fuerza, consiguen un par muy alto y todo ello con un tamaño muy reducido.
Requieren de sistemas de refrigeración según la aplicación y suelen tener las carcasas de aluminio para disipar calor.
Hemos querido daros unos conceptos básicos sobre el servomotor, pero cualquier duda que tengáis nos la podéis preguntar AQUÍ MISMO. También os dejamos un vídeo explicativo al principio del artículo donde os hablamos de este tema, esperamos que os resulte de ayuda.