
 El servomotor Rexroth KSM01 tiene la particularidad de incluir en su carcasa el driver controlador. Además, presenta otras características que le hacen destacar en determinadas aplicaciones industriales avanzadas. En este artículo vamos a ver un mantenimiento preventivo típico de este equipo.
El servomotor Rexroth KSM01 tiene la particularidad de incluir en su carcasa el driver controlador. Además, presenta otras características que le hacen destacar en determinadas aplicaciones industriales avanzadas. En este artículo vamos a ver un mantenimiento preventivo típico de este equipo.
Principales características del Rexroth KSM01.
Evidentemente la principal característica de este equipo es la que ya hemos reseñado al inicio, la integración del driver en el motor. Este hecho va a ser lo que confiere las principales características de este servomotor. Veamos las principales.
-
Integración del Drive:
El servomotor KSM01 de Rexroth integra el controlador de movimiento dentro de la carcasa del motor. Esto reduce la necesidad de espacio adicional en el armario de control y simplifica la instalación y el cableado.
-
Compacto y Ligero:
Gracias a la integración del drive, el diseño es más compacto y ligero. Sin duda esta característica facilita su implementación en sistemas con restricciones de espacio.
-
Alta Eficiencia Energética:
 Estos motores están diseñados para ser altamente eficientes. Por lo tanto consiguen una reducción en el consumo de energía y, por ende, en los costos operativos.
Estos motores están diseñados para ser altamente eficientes. Por lo tanto consiguen una reducción en el consumo de energía y, por ende, en los costos operativos.
-
Flexibilidad y Escalabilidad:
La serie KSM ofrece diversas opciones de configuración para adaptarse a múltiples aplicaciones industriales. El campo de aplicación es amplio, yendo desde la automatización de procesos hasta la robótica avanzada.
-
Conectividad Avanzada:
Incluye capacidades de comunicación avanzadas, lo que permite una fácil integración con sistemas de automatización modernos y redes industriales. Esto incluye soporte para protocolos como EtherCAT y Sercos III.
-
Rendimiento de Precisión:
Proporciona un control de movimiento de alta precisión, esencial para aplicaciones que requieren un posicionamiento exacto y repetibilidad.
-
Eliminación de cableado:
Al llevar integrado el driver en la carcasa del servomotor, la conexión es directa. La primera derivada es evidente, eliminamos tanto el cable del encoder como el cable del driver. El equipo tan solo necesitará de los cables de alimentación y comunicación, lo que implica ahorro en cableado y eliminación de otras necesidades y problemas.
Al prescindir de estos cables eliminamos otras posibles necesidades, por ejemplo a tiradas de cable de más de 15 metros, necesitaremos amplificadores de señal y también filtros para evitar parásitos y ruido eléctrico. A mayor longitud de cable, más ruido eléctrico y además se producen calentamientos del cable, que puede derivar en averías.
Estas características hacen del servomotor KSM01 una opción robusta y eficiente para diversas aplicaciones industriales, facilitando la implementación de sistemas automatizados con menos componentes externos y mayor fiabilidad. Si además desarrollamos un buen plan de mantenimiento preventivo obtendremos un equipo muy fiable y seguro.
Mantenimiento preventivo de un Rexroth KSM01.
 En este caso estamos ante un dispositivo que está sometido a un buen plan de mantenimiento preventivo de forma periódica. Por ello vamos a poder comprobar el perfecto estado del equipo y como la tarea de mantenimiento se limita prácticamente a la renovación de los elementos de desgaste. En concreto los dos rodamientos del equipo y el retén que protege el interior del encoder.
En este caso estamos ante un dispositivo que está sometido a un buen plan de mantenimiento preventivo de forma periódica. Por ello vamos a poder comprobar el perfecto estado del equipo y como la tarea de mantenimiento se limita prácticamente a la renovación de los elementos de desgaste. En concreto los dos rodamientos del equipo y el retén que protege el interior del encoder.
Como vamos a poder comprobar el equipo presenta un estado interior en muy buenas condiciones. Todo ello debido al estricto mantenimiento preventivo al que está sometido.
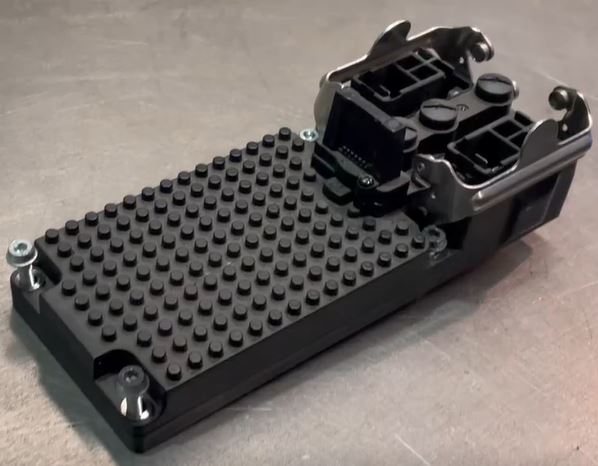
En estos equipos, si se presenta una avería en la parte del servomotor suelen ser de fácil resolución. La facilidad de desmontaje y accesibilidad que presenta es alta. Aunque por contra, el alto grado de encapsulado del driver hace que si la avería se presenta en este dispositivo, la reparación suele resultar muy compleja, pero posible. El driver va conectado directamente al servo motor a través de una conexión en la propia carcasa del servomotor, tal y como podemos ver en la imagen.
Por todo lo que estamos viendo, es más que recomendable llevar un estricto plan de mantenimiento preventivo que evite averías en el dispositivo.
Desmontaje paso a paso. Liberación del driver.
El primer paso será la separación del driver del bloque del servomotor. Como podemos observar en las imágenes el driver va conectado al servomotor a través de un conector en la propia carcasa. Al separar el driver del bloque del servomotor, vemos una película de material metálico entre ellos. Posteriormente en el montaje utilizaremos una pasta térmica para conseguir el mismo efecto de disipación térmica entre ambos dispositivos.
 Acceso a la tapa trasera.
Acceso a la tapa trasera.

Quitamos la tapa trasera para poder acceder al encoder y la zona de conexiones del driver. Al quitar la tapa trasera, el encoder queda accesible para poder realizar su extracción. También podemos observar un antiparasitario que hace quela señal sea más estable, y por supuesto toda la zona de conexiones del driver.
Procedemos a la desconexión del encoder y su extracción. Después liberamos todos los cableados de la conexión del driver.
Acceso al rodamiento trasero.

Una vez desmontada toda la zona de conexiones podemos acceder a la tapa del rodamiento trasero. Una vez liberada la tapa podemos extraerla junto con el rotor. Separamos el rotor de la tapa trasera y podemos acceder a la sujeción del rodamiento.
Extraemos el anillo Seeger que actúa de fijación axial sobre el rodamiento. Una vez liberado el rodamiento procedemos a sus sustitución.
Sustitución del rodamiento delantero.

Al extraer el eje, en él salió el rodamiento delantero y la arandela de fijación de este. Procedemos a sustituir también este rodamiento.
En el bloque del estátor y en su zona delantera está el retén delantero, que garantiza la estanqueidad del estátor. Al tratarse de un elemento de material plástico sufre un deterioro importante, por lo que es necesaria su sustitución.
Esta junta está en permanente contacto con el eje del rotor, que puede girar hasta las 5.000 revoluciones, es decir que genera un desgaste importante en esta pieza de material plástico. Con la sustitución de forma preventiva de este retén garantizamos las propiedades del material y que realice su función de forma satisfactoria. Como podemos ver en las imágenes, el mantenimiento preventivo al que se somete a este equipo ha conseguido que el interior del estátor este en perfectas condiciones de trabajo.
Montaje del equipo.

Una vez sustituidos los elementos de desgaste y comprobado que no existen indicios de malfuncionamientos, como restos de óxido o suciedad en el interior del equipo, se procede al montaje.
Seguimos cuidadosamente todos los pasos de desmontaje en sentido inverso. Montamos el rotor, con sus dos rodamientos nuevos, en el interior del estátor. Utilizaremos fijador para quitar micro holguras sobre las caras de trabajo de los rodamientos.
Acabamos con la colocación del anillo Seeger de nuevo. También colocaremos el anillo de presión que actúa en la parte delantera entre el bloque del estátor y el rodamiento delantero.
Conexionado del motor.
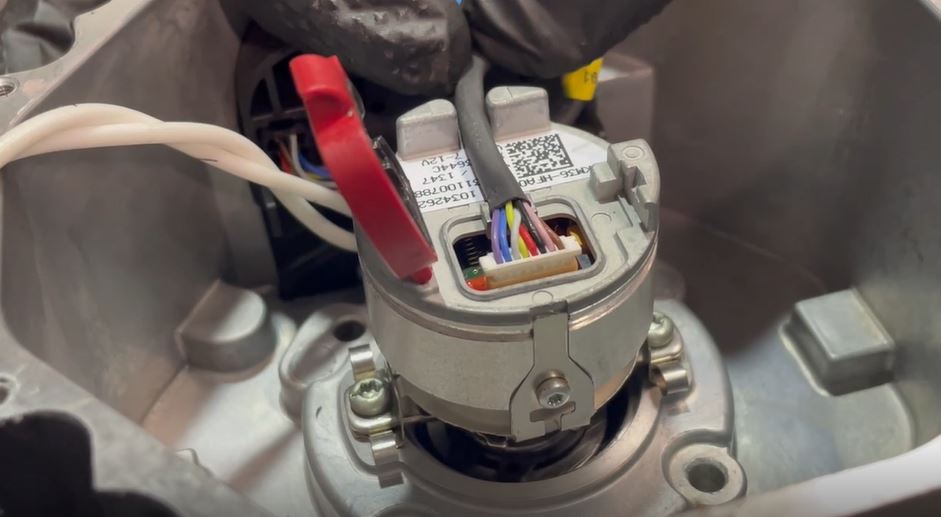
Una vez montado el eje del rotor y fijada la tapa trasera, procederemos a instalar el encoder y colocar el cableado en la conexión del driver. Se ajusta el encoder respecto del motor mediante el uso de un software, y una vez ajustado y montado se cablea a la conexión del driver.
Vemos en las imágenes la facilidad de conexionado que ofrece el Rexroth KSM01 con sus códigos de colores. Terminada la conexión cerramos la tapa trasera y montamos de nuevo el driver sobre la carcasa del servomotor. Ya está listo para comprobación y con todo el mantenimiento realizado.
El último paso, controlcheck.
Una vez finalizado todo el proceso de mantenimiento, el equipo para al departamento de controlcheck, donde se se someterá a un control exhaustivo de calidad. La finalidad de estas pruebas es garantizar la reparación y el correcto estado de trabajo del equipo, de forma que desde GDM podamos dar garantía sobre nuestras reparaciones.
 En concreto a el Rexroth KSM01 se le someterá a dos pruebas concretas. En primer lugar se conectará en el banco de pruebas a una fuente de alimentación y una controladora para poder visualizar en el software de testeo el comportamiento del servomotor. Estas pruebas se suelen mantener durante media hora para comprobar que la respuesta es correcta.
En concreto a el Rexroth KSM01 se le someterá a dos pruebas concretas. En primer lugar se conectará en el banco de pruebas a una fuente de alimentación y una controladora para poder visualizar en el software de testeo el comportamiento del servomotor. Estas pruebas se suelen mantener durante media hora para comprobar que la respuesta es correcta.
En segundo lugar, se realiza una comprobación del par al 100% de trabajo del motor. Para ello utilizamos una llave dinamométrica para medir el par y comprobar que se alcanza la indicación del fabricante. En este caso de 6Nm.
Y una vez finalizadas las pruebas del servomotor en controlcheck se etiqueta como listo y comprobado. Con este paso finaliza la revisión de mantenimiento preventivo, y el equipo está listo para un nuevo ciclo.
Como puedes ver, un equipo perfectamente mantenido alarga su vida útil y ofrece unas rentabilidades muy altas. No esperes a la avería y consúltanos como podemos poner en marcha un plan de mantenimiento para tus servomotores.
EMPIEZA YA, Y DESDE AQUÍ MISMO.