 En esta ocasión, nos enfocaremos en un servomotor ABB 3HAC5954. El mantenimiento correctivo es una parte esencial del ciclo de vida de los equipos industriales. Este equipo es típico en los ejes 2 y 3 de los brazos robóticos de ABB.
En esta ocasión, nos enfocaremos en un servomotor ABB 3HAC5954. El mantenimiento correctivo es una parte esencial del ciclo de vida de los equipos industriales. Este equipo es típico en los ejes 2 y 3 de los brazos robóticos de ABB.
Vamos a describir detalladamente el proceso de desmontaje, identificación de fallos y reparación de este tipo de motor. Además, en el proceso no solamente identificaremos y repararemos la falla que presenta el motor, sino que además iremos realizando tareas de mantenimiento preventivo sobre todos los elementos de desgaste.
Inspección Inicial y Comprobaciones del servomotor ABB.
 Antes de proceder con el desmontaje, es crucial realizar una serie de comprobaciones iniciales para evaluar el estado general del motor:
Antes de proceder con el desmontaje, es crucial realizar una serie de comprobaciones iniciales para evaluar el estado general del motor:
- Funcionamiento del Freno: Verificamos que el freno del motor opera adecuadamente.
- Prueba de Derivación (Baker Test): Utilizamos un tester de aislamiento para asegurarnos de que el motor no tiene derivaciones.
- Derivación entre Bobinas: Comprobamos las derivaciones entre las bobinas. En este caso, observamos algunos fallos de solapamiento en las ondas, probablemente debido al posicionamiento del eje más que a una comunicación interna.
Desmontaje del Motor.
 Iniciamos el desmontaje siguiendo los pasos que detallamos a continuación:
Iniciamos el desmontaje siguiendo los pasos que detallamos a continuación:
- Liberación del Resolver: Quitamos la tapa trasera del motor para liberar el resolver.
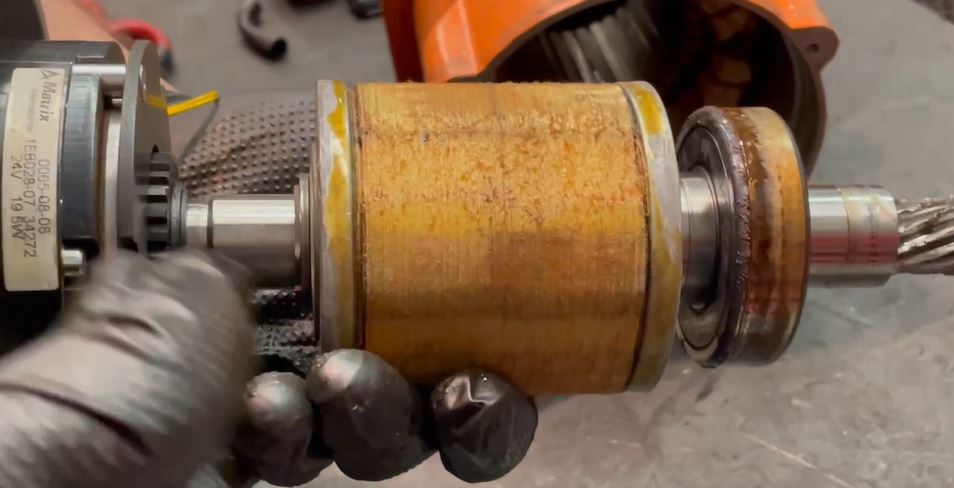
- Retén Delantero y Piñón del Eje: Observamos que el piñón del eje está muy degradado. Quitamos el retén delantero para liberar el eje y proceder con la extracción del rotor.
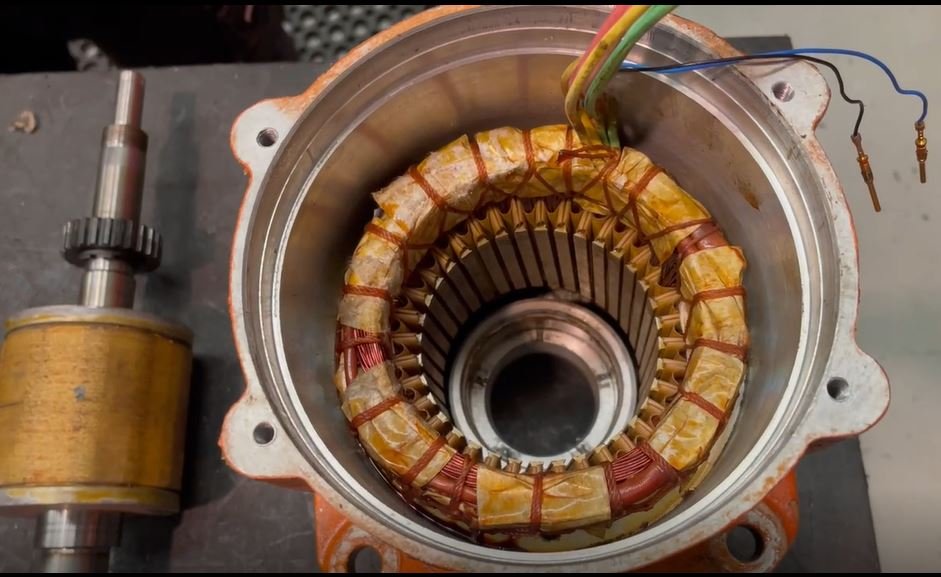
- Extracción del Rotor: Al retirar el rotor, observamos desgaste en el cierre del retén, lo que indica la necesidad de reemplazarlo. También confirmamos el desgaste en los dientes del piñón, identificado previamente.
 Desmontaje Adicional.
Desmontaje Adicional.
- Tuerca del Rodamiento Trasero: Liberamos la tuerca del rodamiento trasero tras quitar la arandela de bloqueo.
- Extracción del Freno: Procedemos a desmontar el freno, observando signos de desgaste en el ferodo y en las caras de fricción.
- Alojamiento del Rodamiento: Verificamos el estado del alojamiento del rodamiento, asegurándonos de que esté en condiciones adecuadas para el montaje posterior.
Identificación y Sustitución de Elementos Desgastados.

Tal y como indicábamos al principio, en esta fase, hemos identificado varios elementos que requieren sustitución:
- Rodamientos
- Retén
- Ferodo
- Eje con Piñón (a mecanizar y reconstruir)
Montaje del Motor.
 Volvemos a montar el servomotor ABB de nuevo.
Volvemos a montar el servomotor ABB de nuevo.
- Preparación del Eje: Preparamos el nuevo eje con su chaveta correspondiente.
- Montaje del Freno: Iniciamos el montaje del freno sobre el eje, montando el rodamiento trasero previamente.
- Rodamiento Delantero y Fijación del Eje: Montamos el rodamiento delantero y fijamos el eje a la tapa trasera a través del freno.
- Unión con el Bobinado: La tapa trasera se une al bobinado del motor.
- Montaje del Resolver: Finalmente, volvemos a montar el resolver en su lugar.

Reconstrucción y Verificación Final.
Reconstruimos las conexiones del servomotor, cambiando las dos juntas y sustituyendo el retén. Una vez completado el montaje, el motor se somete a un control de verificación para asegurar que su comportamiento es el adecuado.
Tarea acabada.
El proceso de mantenimiento correctivo del servomotor ABB 3HAC5954 no solo ha abordado el problema específico del desgaste del piñón del eje, sino que también ha incluido un mantenimiento preventivo de otros componentes susceptibles al desgaste. Con esto, se garantiza que el motor esté en óptimas condiciones de trabajo, prolongando su vida útil y asegurando su rendimiento eficiente en los brazos robóticos.
En el vídeo que os dejamos aquí podéis ver todo el proceso que os hemos detallado.
Este detallado enfoque al mantenimiento asegura que el motor cumpla con los requisitos de operación necesarios para los procesos industriales en los que se emplea, minimizando el riesgo de fallos futuros y mejorando la confiabilidad del equipo.
Si queréis saber más, preguntadnos DESDE AQUÍ MISMO.