
This time we focus on an ABB servo motor 3HAC5954. Corrective maintenance is an essential part of the life cycle of industrial equipment. This equipment is typical of ABB robot arm axes 2 and 3.
We will describe in detail the process of disassembly, fault identification and repair of this type of motor. In addition, we will not only identify and repair the fault in the motor, but also carry out preventive maintenance on all wearing parts.
Initial Inspection and Checks of the ABB servo motor.
 Before proceeding with disassembly, it is essential to carry out a number of initial checks to assess the general condition of the engine:
Before proceeding with disassembly, it is essential to carry out a number of initial checks to assess the general condition of the engine:
- Brake operation: We check that the engine brake is working properly.
- Baker test: We use an insulation tester to ensure that the motor has no shunts.
- Shunt between coils: We check the shunts between the coils. In this case we found some overlapping faults in the shunts, probably due to shaft positioning rather than internal communication.
Dismantle the engine.
 We start the disassembly by following the steps below:
We start the disassembly by following the steps below:
- Release the resolver: We remove the rear engine cover to release the resolver.
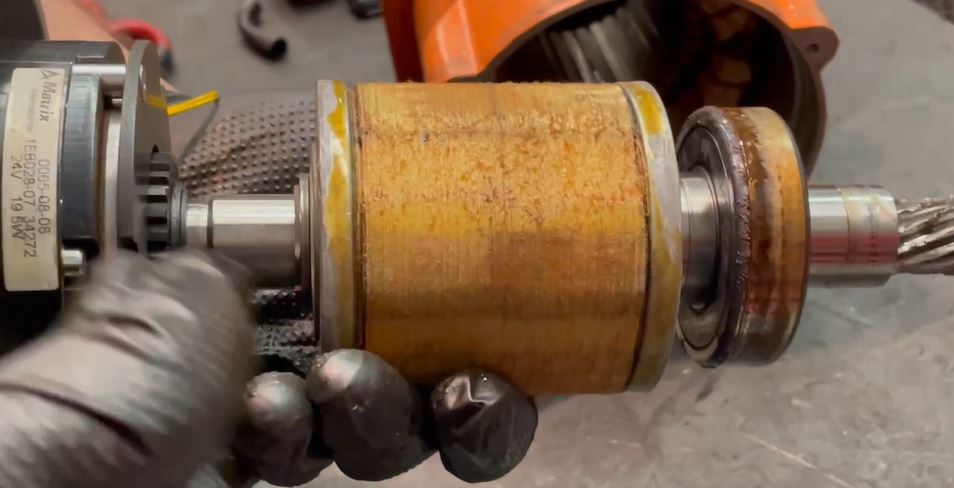
- Front seal and sprocket: We find that the sprocket is very badly damaged. Remove the front seal to release the shaft and proceed with the rotor removal.
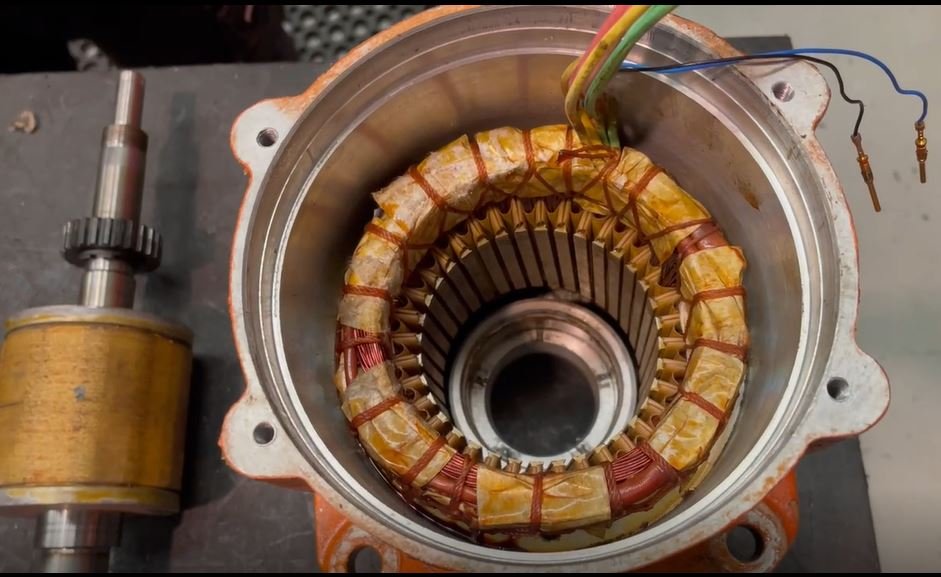
- Rotor removal: On removing the rotor, we observed wear on the seal, indicating the need to replace it. We also confirmed the wear on the pinion teeth that we had previously identified.
 Additional dismantling.
Additional dismantling.
- Rear bearing nut: Unscrew the rear bearing nut after removing the lock washer.
- Remove the brake: Continue dismantling the brake, looking for signs of wear on the brake pads and friction surfaces.
- Bearing housing: Check the condition of the bearing housing to ensure it is in suitable condition for reassembly.
Identification and Replacement of Worn Elements.

As mentioned in the introduction, at this stage we have identified a number of items that need to be replaced:
- Bearing
- Oil Seal
- Ferrule
- Shaft with pinion (to be machined and rebuilt)
Engine Mounting.
We reassemble the ABB servo motor.
- Preparation of the axle: We prepare the new axle with the appropriate key.
- Mounting the brake: We start by mounting the brake on the axle, having previously mounted the rear bearing.
- Front bearing and axle fixing: We mount the front bearing and fix the axle to the rear cover through the brake.
- Winding attachment: The rear cover is attached to the motor winding.
- Resolver assembly: Finally we reassemble the resolver.

Reconstruction and Final Verification.
We rebuild the servomotor connections, replacing the two gaskets and the seal. Once the assembly is complete, the motor is subjected to a test to ensure that its performance is adequate.
Task completed.
The corrective maintenance process for the ABB 3HAC5954 servo motor not only addressed the specific problem of pinion wear, but also included preventive maintenance of other wear-sensitive components. This ensures that the motor is in optimum working condition, prolonging its life and ensuring its efficient performance in the robotic arms.
In the video below you can see the entire process we have detailed (the text of the video is in Spanish).
This detailed approach to maintenance ensures that the engine meets the operational requirements of the industrial processes in which it is used, minimising the risk of future breakdowns and improving equipment reliability.